will stedden
will steddenARFI: A Robotic Dog
Over the past couple of months, me and my friends at Artifice Tech Education have been building our very own robot dog mascot, ARFI. He's been a lot of fun to build, and although we really don't have much in the way of plans or intricate design specs, I thought I'd share some of the production experience here. Hope you enjoy...

Preliminary Construction
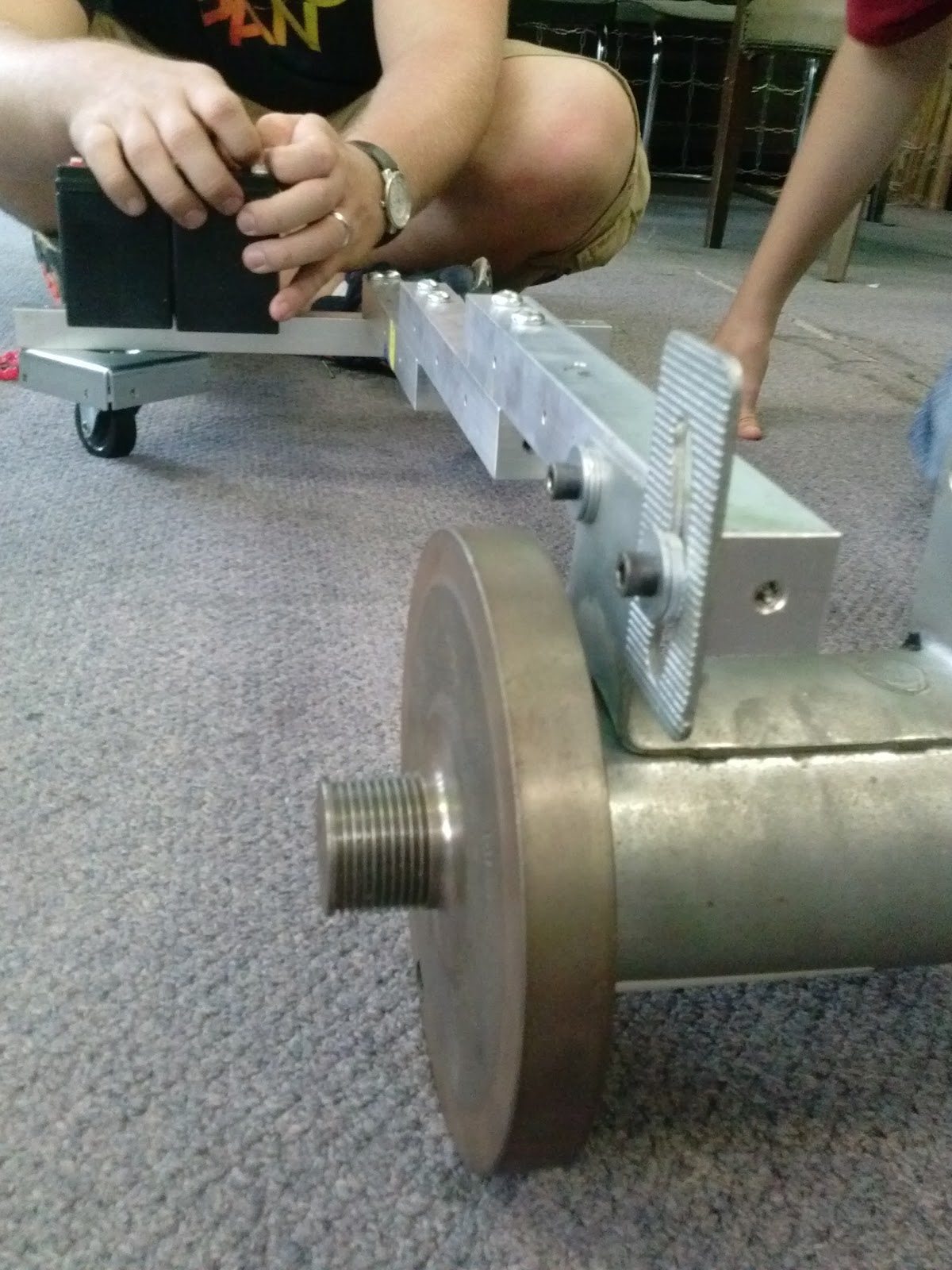
My friends from Artifice went into the machine shop with me to try to piece together the basic aluminum frame to assemble. Eventually we settled on a pretty simple design equipped with rolly chair wheels that we had lying around.

We brought it down to the center where Jeice had a fun time putting it together for us. He got it looking pretty slick for us.

But unfortunately, our design skills were not so clean and our little puppy ran amok and hurt himself.
So it was back to the workbench to figure out the next step.
The trouble with the switch
We quickly reworked the battery mount and made little corrections to the way the wheels worked, but our big problem was wiring up a significantly non-resistant switch to drive the motor.

We finally landed on a home made (read SPARKING) relay that did the trick. Basically, we set up a motor to move a wire back and forth to touch another wire and complete the circuit. The power went straight from battery into the motor to drive it, which I'm pretty sure not how these things normally work.

But it was functional enough to drive out to the parade the very next day.
The final touches
Now that he was running, I decided to bring him in for other people to help us make a little more... dog-like. I'll admit that the kids were teasing me for thinking that this robot was anything like a dog.
I brought him into the Science Hack Day at the Adler planetarium to see who would help me out. Fortunately, quite a few people came around and helped me throw together an exterior for the boy. I thought he looked quite cute by the end.


And of course, the most fun is always getting to drive him around!